Research
We studied the variance patterns in aerial images taken from different heights and created a Variance-Average-Spatial Attention (VASA) mechanism to improve super-resolution models. We also introduced the Super-Resolution Relative Fidelity Index (SRFI) for better cross-scale evaluation. Our Efficient VASA-enhanced Diffusion Model (EVADM) showed strong performance across multiple datasets and tasks, proving its effectiveness in enhancing super-resolution.
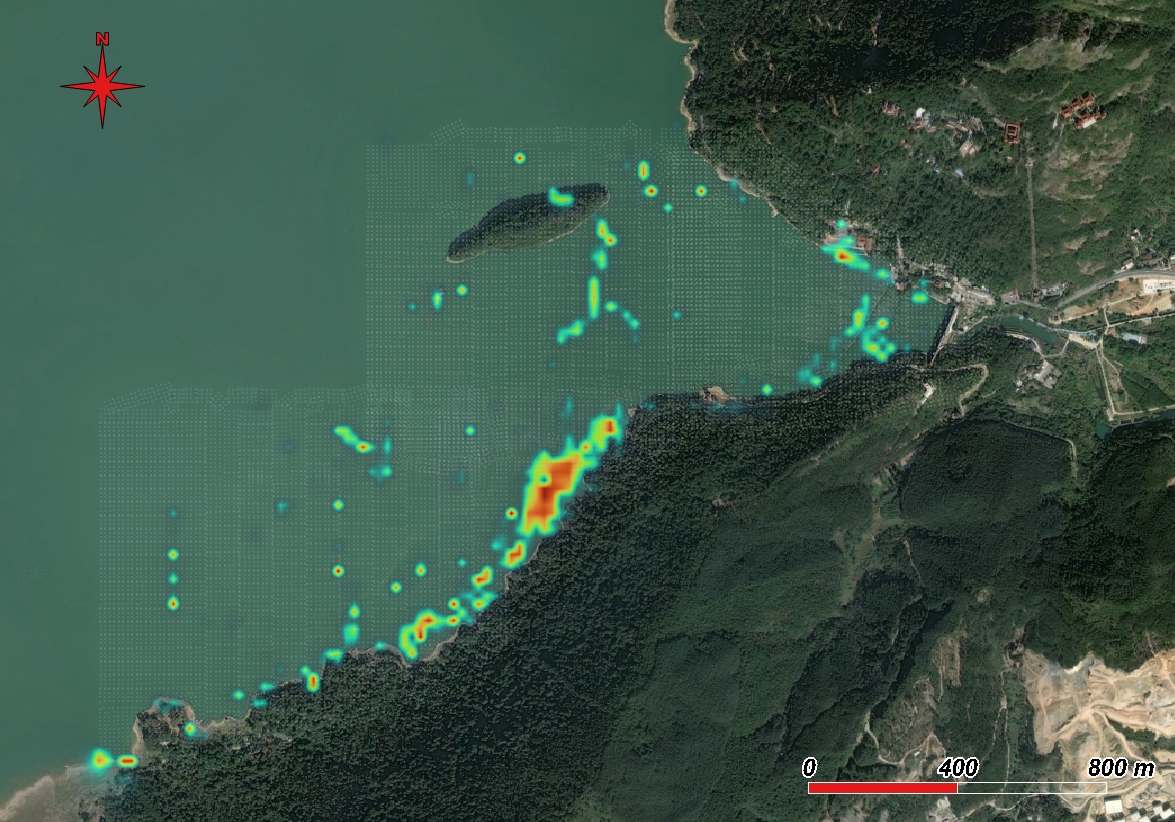
Based on the direct geo-location method and UAV images, we cascaded waterbody segmentation and algal-bloom segmentation models, to achieve a rapid algal-bloom region detection and mapping of lakes.
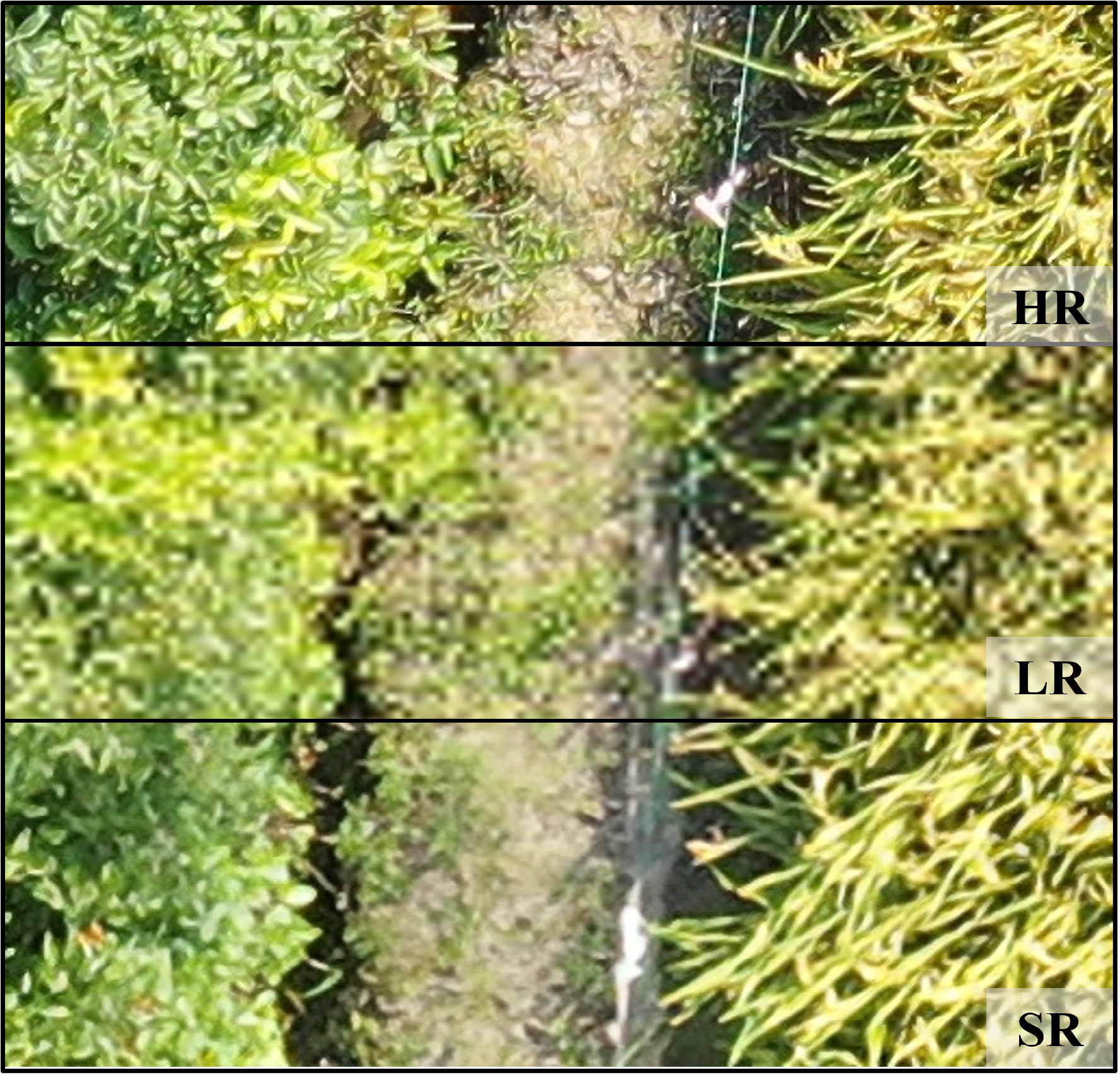
We Utilize semantic segmentation for segmenting rice field and classifying phrenology simultaneously, and Employed ghost convolution to optimize and accelerate bilateral segmentation networks.
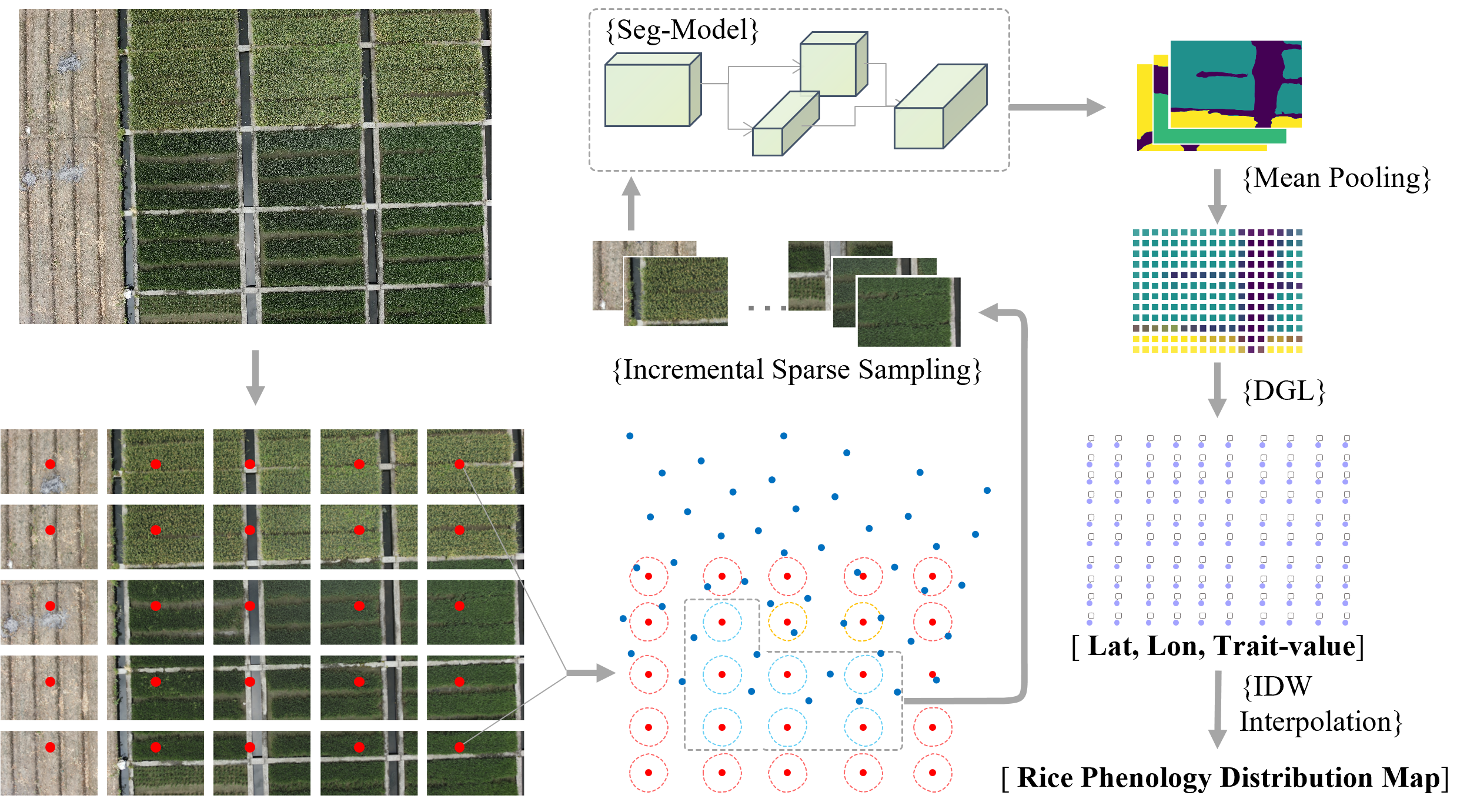
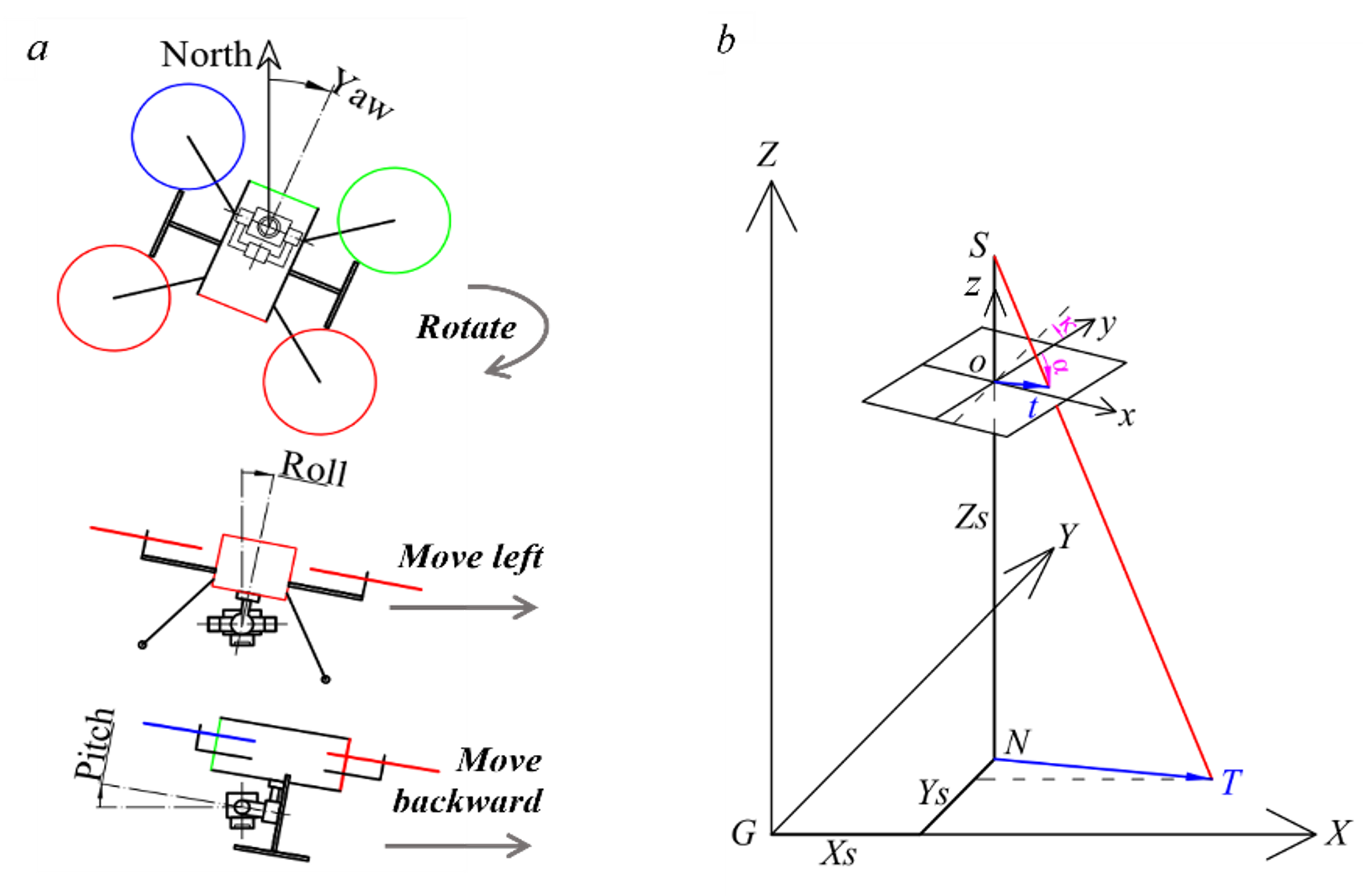
The proposed direct geo-locating (DGL) located the traits in original UAV image directly based on camera parameters and central projection model. Designed an efficient trait mapping workflow with incremental sparse sampling.
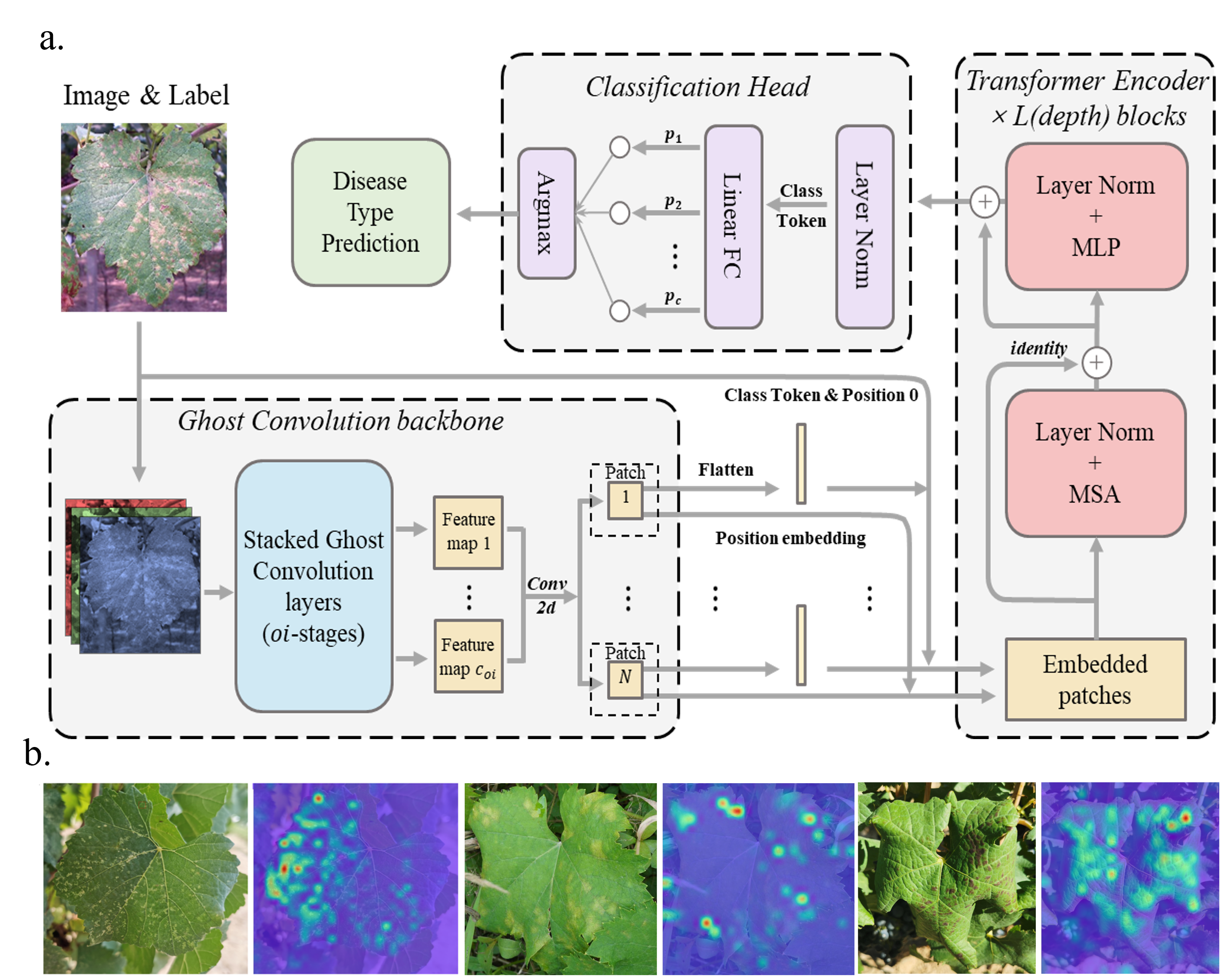
We proposed the Ghost-convolution enlightened transformer (GeT) model for grape leaf symptoms diagnosis. Tested and evaluated models on the grape leaf disease and pest dataset (GLDP12k) that contains 12,615 images in 11 categories, and GeT surpassed other typical models.
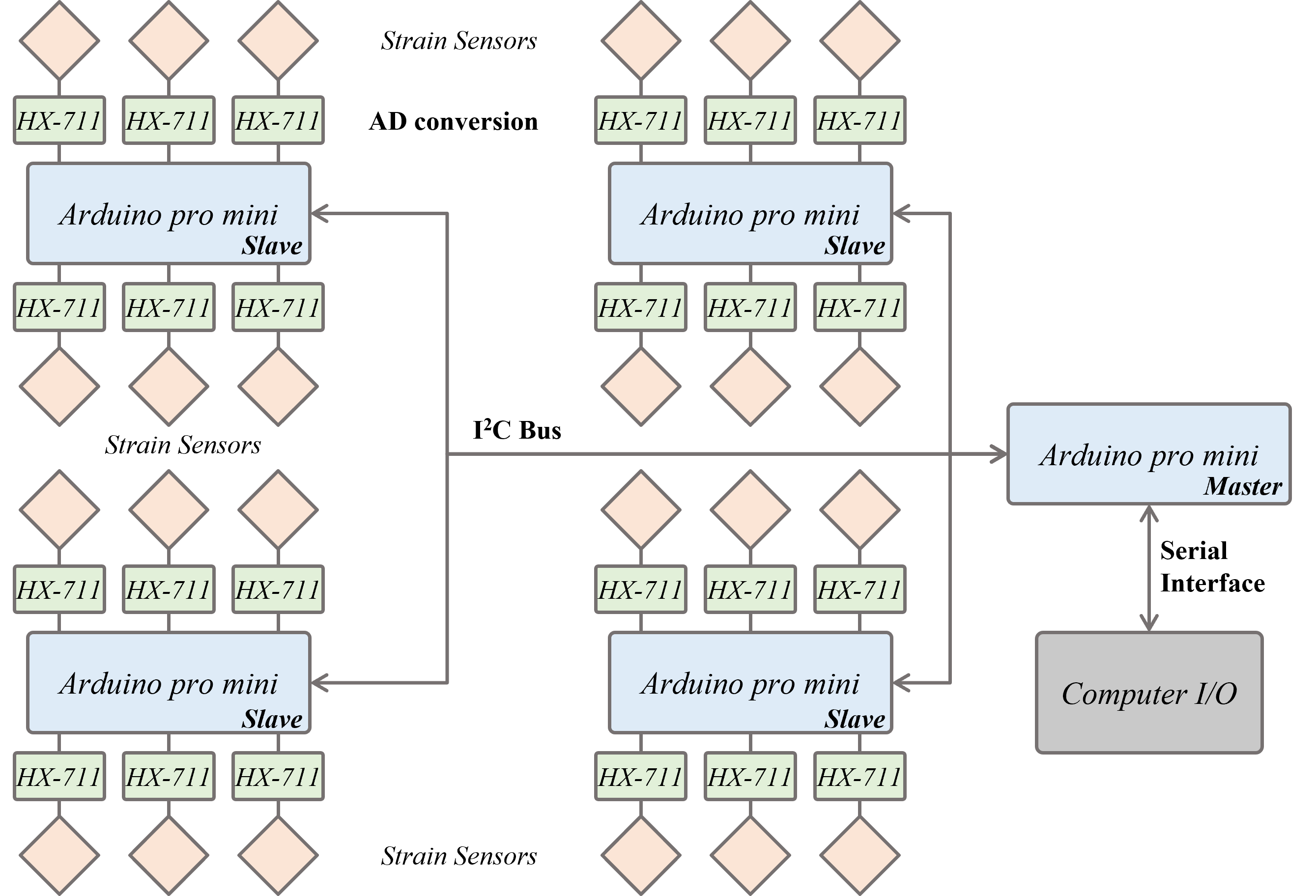
We Designed the scalable data collection solution using I2C bus and a cascaded structure. Implemented a 24-channel weighing system with HD-711 AD module and low-power Arduino Pro Mini microcontroller. Designed and tested PCB circuit diagram of plug-in nodes using Altium Designer.
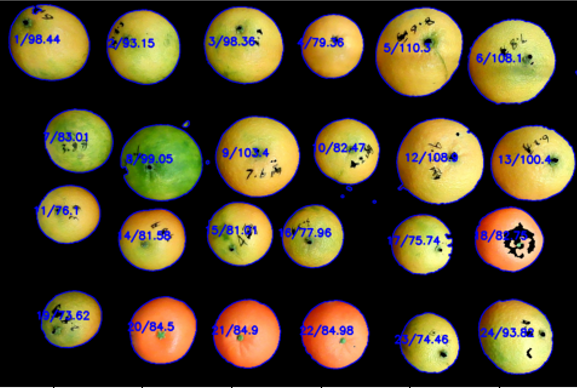
We Segmented citrus instances of RGB image with clear background using HSV color space, then, estimated the fruit size by measuring the pixel-length of the bounding rectangle and camera imaging principle.
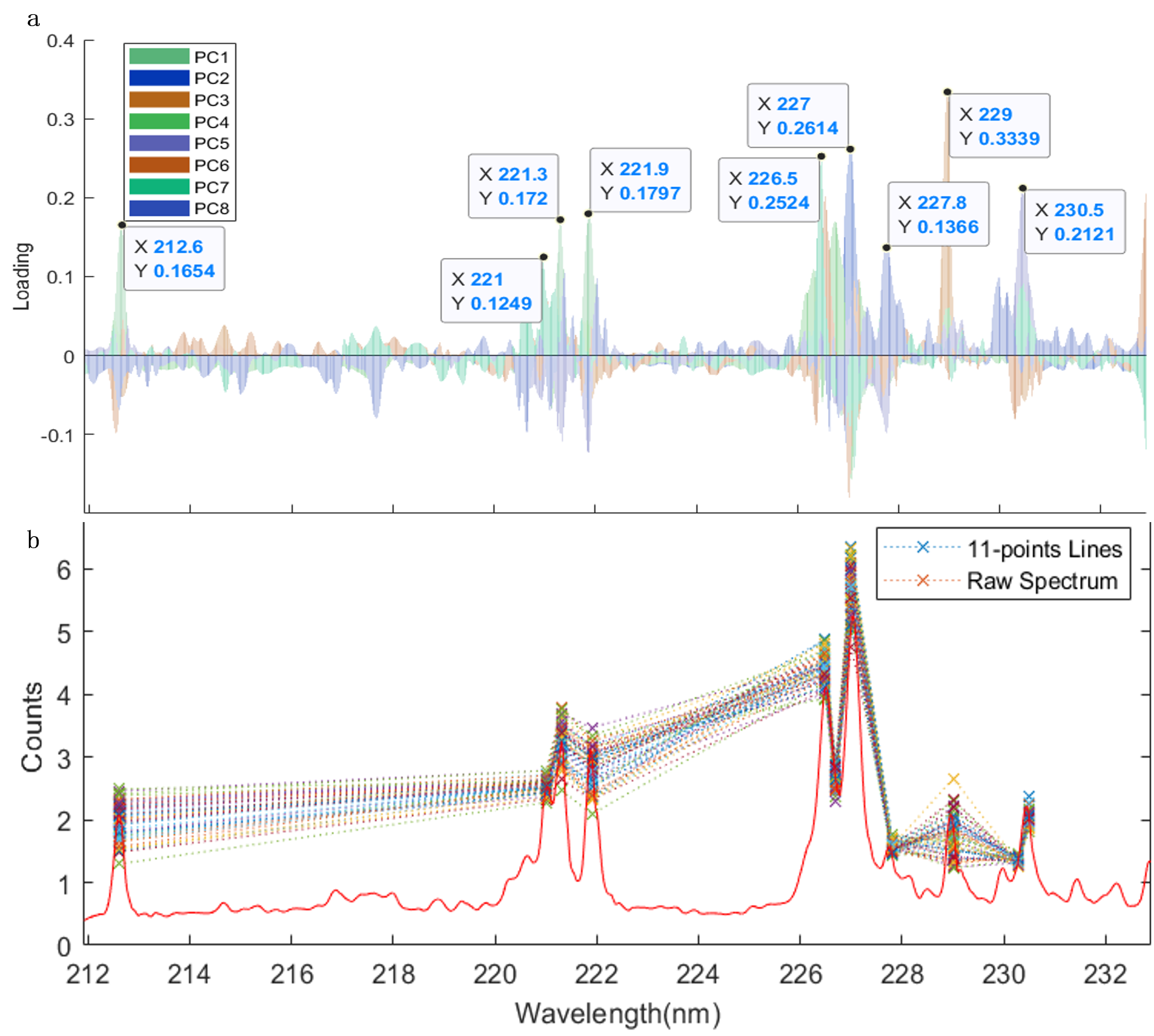
We Detected soil heavy metal containment using laser-induced breakdown spectroscopy (LIBS). Studied the Ar gas environment and light convergence chamber spectrum signal enhancement methods. Designed and simulated a LIBS batch testing platform using SOLIDWORKS.
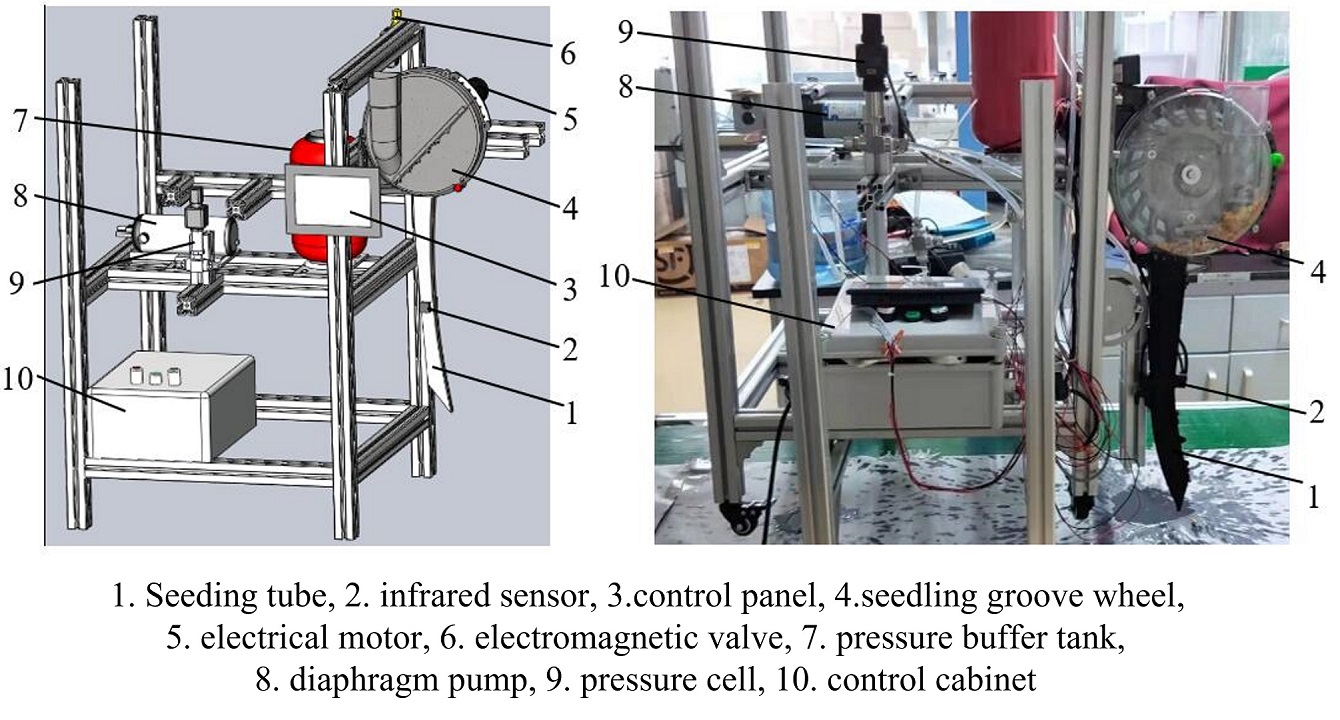
We Designed and assembled a seeder that is capable of spraying liquid seedlings fertilizers while seeding. I was responsible for electrical motor and valve control and parameters tuning.
We Designed a reciprocating mechanism for compressor using the novel curved-groove ball bearing. I was responsible for drawing the schematics and applying for the patent.
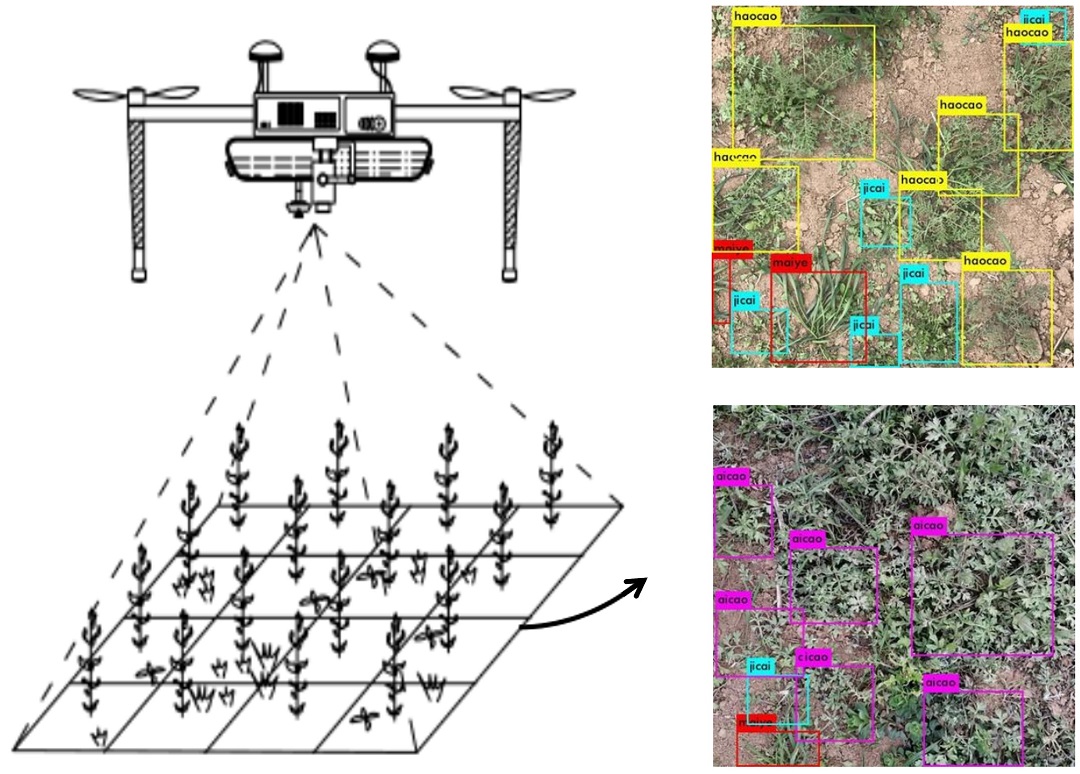
We Collected and labeled a dataset for the detection of 5-kinds of weeds in wheat fields at seedling stage using UAV. I have been appointed as the team leader and have secured funding for the project. I was responsible for implementing and training real-time CNN models for weeds identification.
We Investigated the optimal placement of a charging stations to facilitate the growth of electric vehicles. I was responsible for code implementation of polynomial curve fitting and multi-objective location model using MATLAB.